Phương pháp đo RTK và PPK trong công việc của người khảo sát là thu thập dữ liệu chính xác. Nhiệm vụ này phụ thuộc hoàn toàn vào trình độ chuyên môn của họ. Tuy nhiên, sự phát triển của công nghệ, như máy bay không người lái (UAV), đã làm cho quá trình khảo sát nhanh hơn, an toàn hơn và hiệu quả hơn.
Đo động thời gian thực – phương pháp đo RTK
Phương pháp đo RTK là một kỹ thuật được sử dụng để nâng cao độ chính xác của dữ liệu vị trí thu được từ các hệ thống định vị dựa trên vệ tinh, dựa trên một trạm tham chiếu duy nhất hoặc trạm ảo nội suy để sửa các vị trí tâm ảnh khi đang bay. Nói cách khác, RTK là một phương pháp hiệu chỉnh giúp nâng cao độ chính xác của GNSS.

Ưu điểm phương pháp đo RTK
• Giảm thiểu nguy hiểm vì nó không yêu cầu con người qua các địa hình hiểm trở để rải GCP
• Tiết kiệm thời gian so với GCP, làm cho quá trình năng suất và hiệu quả hơn
• Cung cấp các hiệu chỉnh thời gian thực cho máy bay không người lái tại chỗ
• Lý tưởng để thu vị trí với độ chính xác tuyệt đối trong suốt các chuyến bay trong thời gian thực
• Không cần xử lý hậu kỳ GNSS với hiệu chỉnh thời gian thực
Nhược điểm phương pháp đo RTK
• Khái niệm mới về máy bay không người lái, không được chấp nhận một cách dễ dàng, đặc biệt là vì bản thân công nghệ máy bay không người lái vẫn được coi là mới
• Yêu cầu trạm base, thiết bị đặc biệt và kết nối ổn định để xử lý dữ liệu trong thời gian thực
• Không thể giữ lại dữ liệu mới hoặc cũ để chứng thực trách nhiệm
• Không hoạt động cùng công trường như thiết bị ngoại vi
• Khả năng trục trặc vừa phải
Các phương pháp đo RTK hoạt động tốt ở địa hình bằng phẳng, nơi cây cối hoặc núi non cản trở tín hiệu liên lạc. RTK bị hạn chế bởi tốc độ của liên lạc mặt đất và trên không với UAV. Nếu xa hơn ba km giữa máy bay không người lái và trạm mặt đất hoặc nếu có vật cản như cây cối hoặc núi, sẽ dễ mất tín hiệu.
Để sử dụng RTK, các chuyến bay ở địa hình thoáng và trong phạm vi hai hoặc ba km tính từ trạm mặt đất là lý tưởng.
Đo động hậu xử lý PPK
Một phương pháp thay thế cho RTK là xử lý PPK. Kỹ thuật đo động này điều chỉnh độ chính xác của vị trí tâm ảnh sau khi chụp và tải dữ liệu UAV. Dữ liệu được sửa trong trình quản lý dữ liệu chuyến bay (FDM) và sau đó được xử lý trên đám mây.

Ưu điểm
• Giảm thiểu nguy hiểm vì nó không yêu cầu con người qua các địa hình hiểm trở để rải GCP
• Tiết kiệm thời gian hơn nhiều so với so sánh RTK với GCP vì dành ít thời gian hơn tại công trình để chuẩn bị kết nối RTK
• Thiết lập trạm base dễ dàng hơn vì không cần cáp hoặc kết nối Bluetooth
• Đáng tin cậy hơn RTK vì nó không phụ thuộc vào cường độ tín hiệu hoặc thông tin GNSS từ trạm base trong thời gian thực
• Cho phép chuyến bay linh hoạt hơn vì không cần kết nối để thu thập dữ liệu
Nhược điểm
• Khái niệm mới về máy bay không người lái, không được chấp nhận một cách dễ dàng, đặc biệt là vì bản thân công nghệ máy bay không người lái vẫn được coi là mới
• Cần thêm thời gian để xử lý dữ liệu vị trí sau khi bay
• Dễ mắc lỗi trong quy trình làm việc, có thể gây ra sự thay đổi tham chiếu địa lý hoặc độ chính xác kém trong kết quả tổng thể của dự án
PPK có một số ưu và nhược điểm tương tự RTK so với GCP vì tính an toàn và hiệu quả mà các phương pháp này mang lại. Sự khác biệt chính là phương pháp PPK lý tưởng cho các chuyến bay dài hơn, đặc biệt là các nhiệm vụ bay hồng ngoại BVLOS. Chuyến bay càng dài, càng có nhiều khả năng bị mất tín hiệu đối với kết nối cần thiết cho RTK. Trong khi mỗi phương pháp có ưu nhược điểm riêng, điểm chung là việc tích hợp công nghệ GNSS vào UAV đã giúp cải thiện quy trình làm việc của người điều khiển. Giúp cho nhiệm vụ lập bản đồ của họ chính xác hơn, hiệu quả, tiết kiệm chi phí và quan trọng nhất là an toàn.
Máy bay không người lái RTK là gì và RTK hoạt động như thế nào?
- Máy bay không người lái RTK, nó mang máy thu GNSS RTK. Nó thu thập dữ liệu từ vệ tinh và trạm Base (trên mặt đất) để nâng cao độ chính xác vị trí trên ảnh chụp trong thời gian thực khi nó bay.
- Bản thân dữ liệu vệ tinh, và trong mọi trường hợp, dữ liệu vệ tinh dễ bị lỗi do sự chậm trễ tầng đối lưu, v.v., cung cấp độ chính xác tối đa khoảng 1 mét
- Dữ liệu từ trạm mặt đất được xác định để sửa lỗi tín hiệu vệ tinh, đưa độ chính xác vị trí xuống phạm vi cm.
- Trong trường hợp công nghệ Drone RTK, tín hiệu từ trạm Base GNSS được kết nối với máy bay liên tục thông qua trạm Base của Drone đặt tại khu vực bay chụp.
- Khi máy bay không người lái hạ cánh, nếu tất cả các tín hiệu không đổi, dữ liệu ảnh có tọa độ chính xác tuyệt đối cho hậu xử lý để thành lập bản đồ.
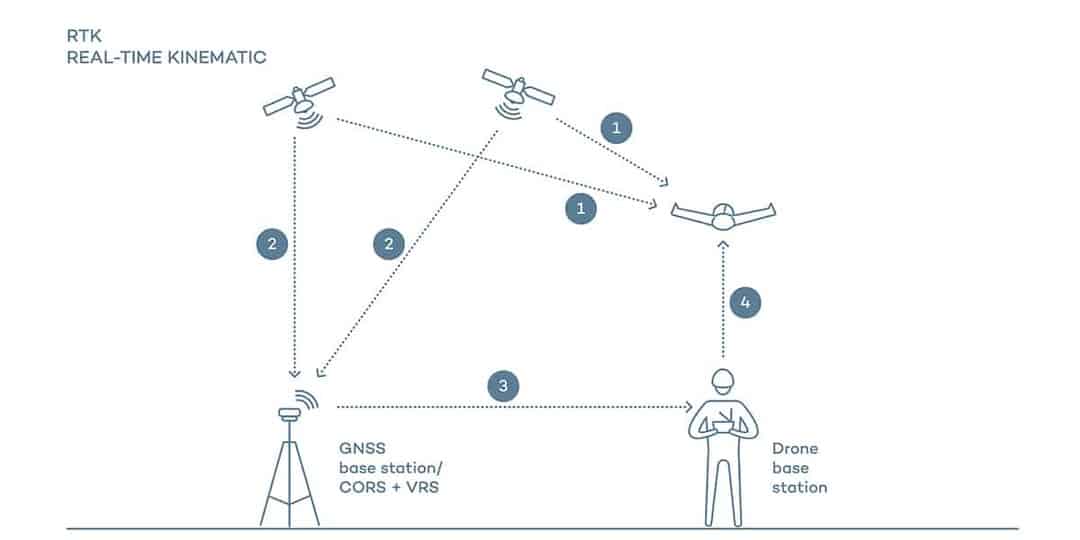
Drone RTK cần 4 đường truyền tín hiệu không đổi trong quá trình đo đạc.
- Đường truyền tín hiệu giữa vệ tinh và máy bay không người lái
- Đường giữa vệ tinh và trạm Base GNSS hoặc mạng CORS (hỗ trợ VRS qua di động)
- Đường giữa trạm Base GNSS hoặc CORS / VRS và trạm Base Drone
- Đường truyền tín hiệu giữa trạm Base Drone và Drone.
Kỹ thuật Drone RTK rất tốt nếu như các đường truyền tín hiệu được kết nối liên tục. Tuy nhiên, trong điều kiện thực tế sẽ có một số trục trặc như có chướng ngại vật chặn tín hiệu. Hoặc máy bay bay xa vùng phủ của tín hiệu. Lúc này, tín hiệu bị ngắt quãng và ảnh chụp sẽ mất độ chính xác như kỳ vọng. Trong trường hợp tốt nhất, tín hiệu giữa Base GNSS và máy bay được kết nối liên tục, độ chính xác sẽ giống như phương pháp PPK.
Đo đạc bản đồ bằng UAV PPK là gì và phương pháp đo PPK hoạt động như thế nào?
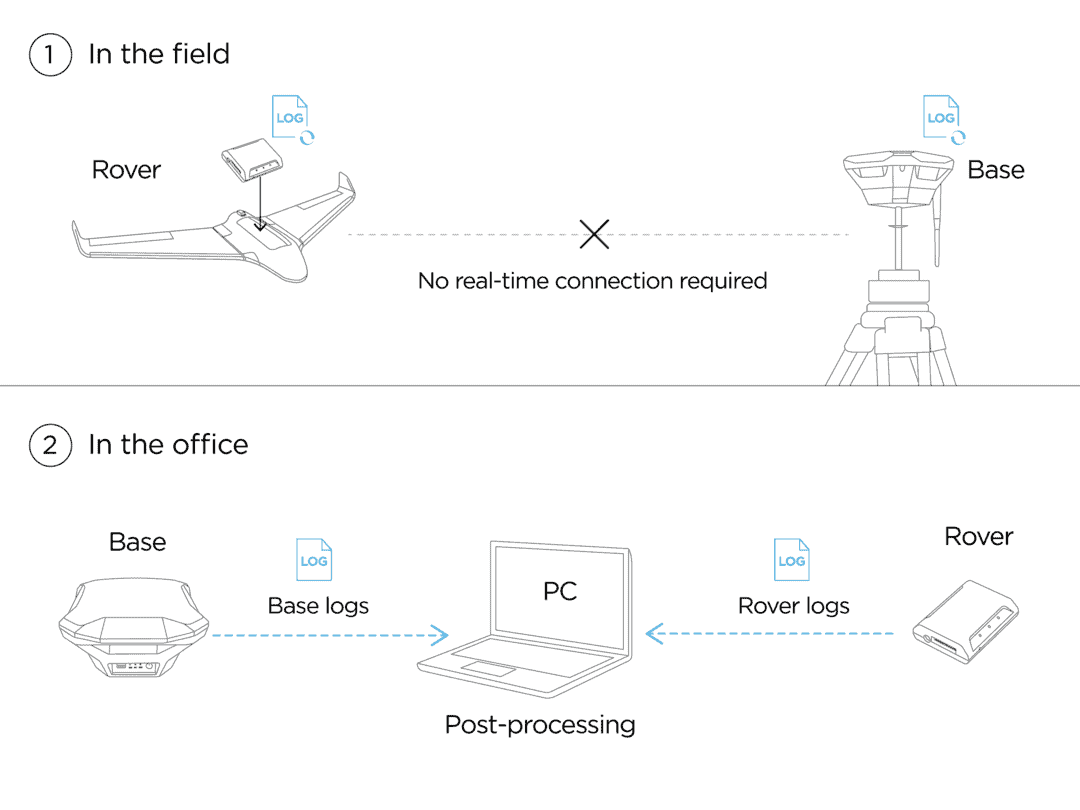
- Một máy bay không người lái PPK bay với máy thu PPK GNSS trên máy bay, thu thập dữ liệu từ các vệ tinh, nó ghi lại tín hiệu và sẽ lấy sử dụng sau khi chuyến bay kết thúc.
- Bản thân dữ liệu vệ tinh, và trong mọi trường hợp, dễ bị lỗi do sự chậm trễ tầng đối lưu, v.v., cung cấp độ chính xác tối đa khoảng 1 mét
- Dữ liệu vệ tinh từ máy thu GNSS tại trạm Base (mặt đất) gần đó được thu thập. Sau khi kết thúc chuyến bay, nó cung cấp dữ liệu để sửa lỗi tín hiệu vệ tinh, đưa độ chính xác vị trí của ảnh chụp xuống phạm vi cm.
- Trong trường hợp của công nghệ PPK, không cần liên kết giữa Base GNSS đến trạm Base Drone và cũng không cần liên kết giữa Base Drone và Drone để cải thiện độ chính xác của ảnh chụp. Phương pháp này chỉ cần thu thập tín hiệu từ trạm Base Drone và Drone.
- Khi máy bay không người lái hạ cánh, một quy trình hiệu chỉnh độ chính xác của ảnh thông qua một phần mềm phù hợp, ví dụ: WingtraHub. Dữ liệu với độ chính xác tuyệt đối sau đó có sẵn để thành lập bản đồ.
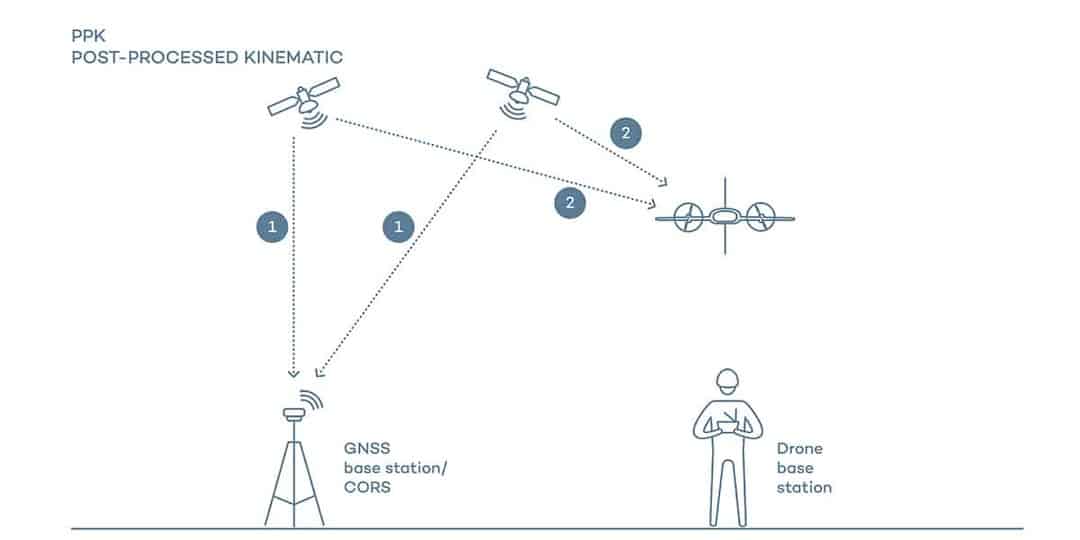
PPK yêu cầu hai đường liên lạc không đổi để chỉnh sửa dữ liệu vị trí vệ tinh:
- Đường giữa vệ tinh và trạm Base GNSS hoặc mạng CORS
- Đường tín hiệu giữa vệ tinh và máy bay không người lái.
Do bạn không cần duy trì liên kết giữa trạm Base GNSS và trạm Base Drone và liên kết giữa trạm Base Drone và máy bay không người lái trong trường hợp PPK. Phương pháp này hiệu chỉnh dữ liệu đáng tin cậy hơn và thiết lập dễ dàng hơn.
Nếu bạn đã từng đo đạc bằng máy bay không người lái, bạn sẽ biết rằng sự gián đoạn ngắn trong các liên kết tín hiệu xảy ra khá thường xuyên. Khi tín hiệu bị mất, bạn phải tốn công để thiết lập lại chuyến bay để bổ sung, nhiều khi cũng không thể được do điều kiện về vật cản…. Vì vậy, với RTK, nhiều khi dữ liệu của bạn sẽ không đầy đủ cho toàn dự án và độ chính xác của vị trí ảnh chụp bị giảm xuống.
Phantom 4 PPK
Tổng quan

Phantom 4 PPK là thiết bị bay không người lái kết hợp giữa Phantom 4 Pro/Advance với một bộ PPK tích hợp.
Bộ PPK tích hợp với Phantom 4 Pro của bạn chỉ trong vài giây – mà không cần bất kỳ sửa đổi nào.
Nó có thể dễ dàng tháo rời nên bạn vẫn có thể sử dụng hộp đựng dụng cụ của mình
Đèn LED phía trước trên Phantom 4 Pro nhấp nháy mỗi khi chụp ảnh. Một phototransistor phát hiện nhấp nháy và một mốc thời gian được ghi lại trong tệp nhật ký của bộ thu Reach.
Các mốc thời gian được trích xuất và kết hợp với các hình ảnh dưới dạng thẻ địa lý (geotagg) chính xác. Độ chính xác được cải thiện hơn nữa bằng cách đặt Phantom 4 PPK trên mục tiêu GCP và chụp ảnh khi Phantom 4 PPK đứng yên.
Vị trí này không bị lỗi thời gian cửa trập, sai số do thăng bằng, sai số do hiệu chỉnh máy ảnh.
Thiết bị Phantom 4 PPK bao gồm
- Phantom 4 Pro / Advance
- Emlid Reach M + & ăng-ten Tallysman
- Bộ thu cơ sở có thể thu file RINEX
- Bộ dụng cụ PPK
Tại sao nên sử dụng Phantom 4 PPK?
Về độ chính xác:
- Dữ liệu ảnh chụp từ Phantom 4 Pro có độ chính xác vài m. Thiết bị PPK có thể giúp tăng độ chính xác tâm ảnh lên đến cm
- Sai số chính xác của kết quả khảo sát bằng Phantom 4 Pro PPK trong 2-3 cm, có thể đáp ứng tiêu chuẩn thành lập bản đồ 1:500.
- Sai số gần tương đương Phantom 4 RTK
Về giá thành
- Đối với Phantom 4 RTK, giá thành ở Việt Nam dao động từ 150 triệu đến 180 triệu
- Đối với Phantom 4 PPK, giá thành rẻ hơn từ 2 đến 3 lần. Tùy vào thiết bị bạn sử dụng.
- Nếu bạn đã có Phantom 4 Pro, bạn chỉ cần đầu tư bộ PPK để tích hợp thiết bị hiện tại của mình
- Nếu bạn chưa có Phantom 4 Pro, bạn có thể tiến hành đầu tư cũ hoặc mới. Đối với Phantom 4 pro cũ giá chỉ dao động tầm 20 triệu
Về thời gian khảo sát
- Khi khảo sát bằng Phantom4 PPK bạn không cần thiết lập nhiều điểm khống chế mặt đất, địa hình phức tạp cũng có thể làm giảm hơn 80% số điểm kiểm soát mặt đất!
- Thời gian giảm tới 60-80%
Nếu quan tâm đến Phantom 4 RTK, bạn vui lòng liên hệ đến Hotline 0944 487 777 hoặc 0982 826 667 để chúng tôi hỗ trợ nhanh nhất!
Công ty CP Thiết bị Thắng Lợi Victory – Nhà Nhập khẩu và Phân phối Thiết bị khoa học kỹ thuật hàng đầu Việt Nam.


Không có nhận xét nào:
Đăng nhận xét